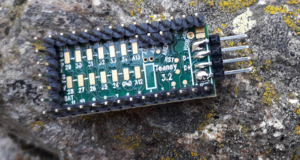
Une teensy à 600MHz, avec FPU, Mo de RAM, 2 Mo de flash mais sans DAC. La datasheet du microcontroleur se trouve ici et de sa famille ici.
Première impression :
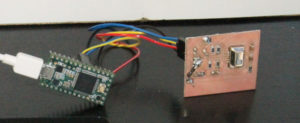
Le module a presque la même empreinte que celui de la teensy3.1. Mais il n’y a pas de pins pour A14, A10 et A11. Donc il va falloir créer une carte d’adaptation.
Premier programme :
Après avoir installer l’IDE Arduino 1.8.10 puis le logiciel teensyDuino, …
J’ai choisi la carte la Teensy4.0 puis ouvert l’exemple Blink.
J’ai relié la carte via un câble µUSB et attendu qu’elle soit reconnue par le système puis programmation.
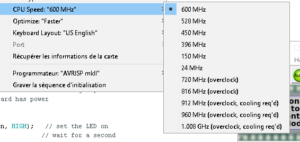
Apparemment, on peut overclocker jusqu’à 1GHz.
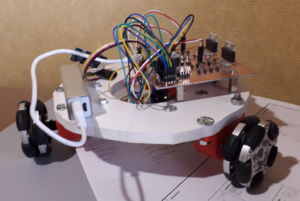
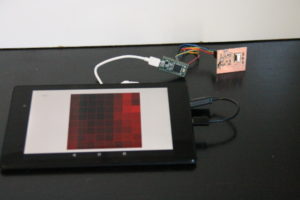
Test avec un microphone et identification de la fréquence fondamentale d’un son.